面向健康养老的智能轮椅关键技术与产品样机
成果名称 | 面向健康养老的智能轮椅关键技术与产品样机 | |||||||
成果联系人 | 高翔/徐国政 | 职称 | 教授 | 所在单位 | 自动化学院、人工智能学院 | |||
联系电话 | xugz@njupt.edu.cn | |||||||
技术成熟度 | 技术分类 | |||||||
核心专利号 | ZL201710412172.3;ZL201610180343.X;ZL201710531252.0;ZL201510872912.2;软著登字第5702079号 | |||||||
所属学科方向 | 一级学科 | 仪器科学与技术 | 二级学科 |
| ||||
应用行业 | 医疗康复,养老服务等行业 | |||||||
项目概况: 据联合国人口发展基金会的统计数据显示,目前全世界60岁以上的人口已达8.1亿,占全世界总人口的11%;预计到2050年,60岁以上的人口已达20.3亿,占全世界总人口的22%,人口老龄化已成为世界范围的重大社会问题。另据全国老龄委办公室提供的信息预测,预计到2050年,中国老年人口将达到4亿,将达到全国人口的三分之一,人口的老龄化问题将很快成为我国面临的前所未有的新挑战。 随着我国人口的加速老龄化,这部分人群中将会存在大量由脑血管疾病或神经系统疾病造成的运动、感觉和认知等功能残障患者。随着国民经济的发展,这个特殊群体已得到更多人的关注、治疗、康复和服务于他们的产品技术和质量也在相应地提高。“如何为这部分人群提供较好性能的代步工具,改善他们的生活质量,健康、体面地度过晚年时光”已成为社会重点关注的问题。 由于高龄老年人的身体协调能力日趋变差,生理衰退现象日趋严重,将会存在大量的运动、感觉和认知等功能残障患者,普通轮椅无法满足这类人群的出行需求。 智能轮椅是将智能机器人技术应用于普通的电动轮椅,融合信息、控制、传感技术、人工智能、通信等技术,具有自主导航、自主避障、危险报警、多种人机交互控制等功能,可以更好地满足高龄老人/残障人士的出行需要,提高他们的生活自理能力,更好地融入社会。
| ||||||||
关键技术:
南京邮电大学机器人信息感知与控制研究所高翔教授、徐国政教授、王强博士、朱博博士、谭彩铭博士、陈盛博士、梁志伟博士等研发了智能轮椅的关键技术与产品样机: (1)智能轮椅驱动控制技术 驱动控制系统直接关系到智能轮椅的舒适性和安全性,在分析现有电动轮椅控制系统的基础上,重点设计安全可靠的硬件电路;研究双电机差速控制方法,实现轮椅的前进、后退、原地转弯,并提高转向舒适性;设计多重安全保护功能。 (2)定位与导航技术 定位导航系统设计直接反映出智能轮椅的智能行为,在充分理解移动机器人定位与导航技术基础上,重点研发室内结构化环境感知方法,创建智能轮椅室内运行环境地图,设计智能轮椅定位和基于视觉信息的导航系统。 (3)多模人机交互技术 多模人机交互系统直接反映出智能轮椅使用的便利性和友好性,为方便不同类型老年/残障人群借助轮椅机器人实现半自主服务需要,重点研发基于多自由度手控器、语音、头姿、手势等模式的智能轮椅人机交互控制技术,并为异常情景提供报警接入。 (4)基于物联网技术的远程生理参数监控 在对老年人/残障患者进行日常生活护理服务过程中,为保证老年人/残障患者安全,运用物联网技术,设计可穿戴远程生理参数监控系统,实时对乘坐在轮椅上的老年人/残障患者进行远程监控,并具备远程自动报警功能。
| ||||||||
应用领域和市场前景: 本项目研发的智能轮椅主要面向高龄老人及肢体残障人士,在老人院、福利院、康复中心,社区医院、家庭用户等均有广泛的需求。 工业和信息化部办公厅、民政部办公厅、卫生计生委办公厅联合发布的《智慧健康养老产品及服务推广目录》涵盖了智能轮椅(智能健康养老产品中的4.2小类--智能康复设备)。 我国老龄产业发展政策环境良好,市场需求逐渐释放,市场供给不断扩大,智能轮椅迎来了前所未有的发展机遇。
| ||||||||
合作方式(技术转让,技术开发,技术服务,技术咨询,技术入股): *技术转让 *技术开发 *技术咨询 *技术服务 *技术入股 | ||||||||
图片:(1-5张,文件大小不低于1MB,图片清晰,并标注图片说明)
图1:轮椅驱动系统调试 图2:自行研制的轮椅驱动系统
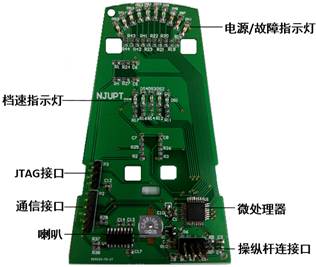
图3:轮椅操纵手柄驱动电路 图4:智能轮椅多模人机交互原型样机
| ||||||||